

Birden çok robottan oluşan ekipler, örneğin arama ve kurtarma görevleri sırasında insan ajanlara yardım etmek, çevreyi izlemek veya doğal afetlerin neden olduğu hasarı değerlendirmek gibi bir dizi karmaşık gerçek dünya sorununu çözmeye yardımcı olabilir. Geçtiğimiz birkaç yıl içinde, çoklu robotlu sistemler, uzay veya zaman üzerinde bir dağılım içeren problemleri çözmek için özellikle yararlı olduğunu kanıtladı (yani, ajanların uzun mesafeleri kat etmesine veya zaman içinde süreçleri izlemesine izin verme).
Pennsylvania Üniversitesi GRASP Laboratuvarı’ndaki araştırmacılar yakın zamanda robot ekiplerinin zaman içinde çevresel süreçleri modellemesine izin veren bir çerçeve geliştirdi . ArXiv’de önceden yayınlanan bir makalede sunulan bu çerçeve, orman yangınları, böcek istilaları veya kirletici maddelerin dağılımları gibi karmaşık, dinamik ve doğrusal olmayan olayların evrimini tahmin etmek için çoklu robot sistemlerinin kullanılmasını sağlayabilir .
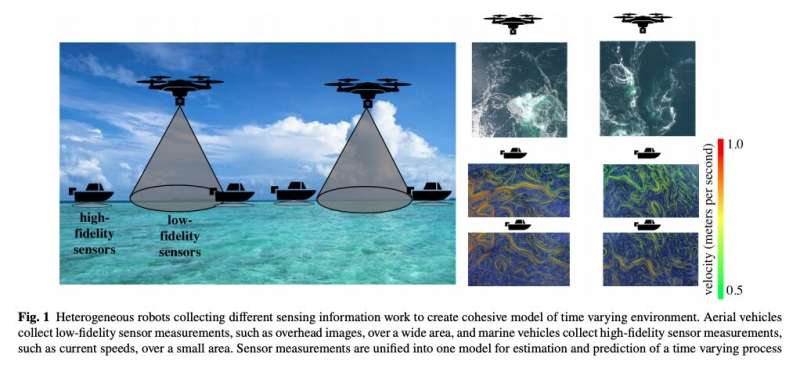
Tahiya Salam ve “Bir türden robotların yavaş zaman ölçeğinde yüksek doğrulukta ölçümler topladığı ve başka türden robotların, ölçümleri bir araya getirmek amacıyla hızlı bir zaman ölçeğinde düşük doğrulukta ölçümler topladığı birleştirilmiş bir strateji öneriyoruz,” M. Ani Hsieh makalesine yazdı.
Araştırmacılar tarafından geliştirilen çerçeve, farklı hareket kalıplarına ve algılama yeteneklerine (örneğin, hava, yer ve deniz robotları) sahip iki robot ekibinin kullanılmasını gerektirir. Bazı çevresel süreçler karmaşık ve çok boyutlu olabileceğinden, bu robot ekipleri farklı boyutları keşfedebilir ve farklı ölçümler toplayabilir.
Araştırmacıların çerçevesi, karmaşık, doğrusal olmayan uzay-zamansal süreçlerin bir modelini oluşturmak için iki farklı robot ekibi tarafından toplanan ölçümleri birleştiriyor. Bu model daha sonra mobil robotlar için en uygun algılama konumlarını belirlemek ve çevresel süreçlerin zaman içinde nasıl gelişeceğini veya gelişeceğini tahmin etmek için kullanılabilir.
Araştırmacılar makalelerinde, “Sunulan çerçeve, verilerde görünen zamansal ve uzamsal modların ayrılmasına izin veriyor” diye yazdı. “Bu ayırma, daha sonra çeşitli robot türleri için bir görev tahsis çerçevesi içinde kullanılıyor. Tipik olarak heterojen robotik çerçeveler tarafından kullanılan standart görev-özellik tahsis yaklaşımlarına güvenmek yerine, bu yaklaşım, bir görevi birlikte tamamlamak için robotların benzersiz güçlerinden yararlanıyor. “
Salam ve Hsieh, çerçevelerini bir dizi karma gerçeklik deneyinde değerlendirdi. İlk olarak, yapay bir plazma bulutunun evrimini tahmin etme yeteneğini değerlendirdiler. Bunu yapmak için, Dünya’nın çevresindeki bir plazma bulutunu kopyalayan simüle edilmiş bir ortam yarattılar. Daha sonra, bulutun evrimi ile ilgili farklı ölçümler ve tahminler toplaması beklenen dört deniz robotunu ve iki hava aracını simüle edilmiş ortama tanıttılar.
Araştırmacılar, simüle edilmiş hava ve deniz araçları tarafından toplanan ölçümleri birleştiren bir model oluşturmak için çerçevelerini kullandılar. Daha sonra bu modelin tahminlerini, yalnızca bir tür robot tarafından toplanan ölçümlere dayalı olanlarla karşılaştırdılar.
Araştırmacılar makalelerinde, “Başlangıçta önerilen heterojen yaklaşım, sadece homojen deniz aracı verilerini kullanmakla karşılaştırılabilir bir performans sergiliyor” diye yazdı. “Hava araçlarından gelen homojen veriler gürültülüdür ve gerçek süreçten çok daha düşük bir uzaysal çözünürlükte toplanır. Süreç daha karmaşık hale geldikçe, birden çok veri türünün dahil edilmesi, önerilen yaklaşımın diğer tahminlerden daha iyi performans göstermesini sağlar.”
Performansını daha fazla değerlendirmek için araştırmacılar, çerçevelerinin gerçek bir su tankının içine yansıtılan farklı bir yapay plazma bulutunun yoğunluğunu modelleme becerisini değerlendirdiler. Bu deneyde, üç gerçek mikro özerk yüzey aracı (mASV), simüle edilmiş bir mASV ve iki simüle edilmiş hava aracı kullanarak ölçümler topladılar.
Genel olarak, Salam ve Hsieh tarafından gerçekleştirilen testler , tek bir robot türü tarafından toplanan ölçümleri kullanmak yerine karmaşık çevresel süreçleri modellemek için farklı robot türleri tarafından toplanan ölçümlerin birleştirilmesinin avantajlarını vurgulamaktadır . Gelecekte, bu sistemler bilim insanlarının farklı ortamların birleşik haritalar veya modeller oluşturmasına, örneğin hava ve deniz robotlarını kullanarak sıcaklık veya okyanus akıntıları gibi faktörleri ortak bir şekilde haritalamasına izin verebilir.
Alıntıdır bknz: Techxplore