
Çocuğu olan herkes bilir ki, bir çocuğu kontrol etmek zor olsa da, birçoğunu aynı anda kontrol etmek neredeyse imkansızdır. Araştırmacılar, gittikçe karmaşıklaşan bileşenler ve algoritmalar kullanarak etkileşimlerini (oluşumdaki uçaklar gibi) dikkatli bir şekilde koreografi yapmadıkça, robot sürülerinin kolektif olarak çalışmasını sağlamak da aynı derecede zor olabilir. Ancak, eldeki robotlar basit, tutarsız ve koordineli davranış için gelişmiş programlamadan yoksun olduğunda güvenilir bir şekilde ne yapılabilir?
Her ikisi de Georgia Teknoloji Enstitüsü’nde ADVANCE Bilgisayar Profesörü Dana Randall ve Dunn Ailesi Fizik Profesörü Daniel Goldman liderliğindeki bir araştırma ekibi, en basit robotların bile bir kişinin yeteneklerinin çok ötesinde görevleri yerine getirebildiğini göstermeye çalıştı. hatta birkaç tanesi. Ekibin “aptal robotlar” (esasen mobil granüler parçacıklar) dediği şeyle bu görevleri yerine getirme hedefi beklentilerini aştı ve araştırmacılar tüm sensörleri, iletişimi, belleği ve hesaplamayı kaldırabildiklerini ve bunun yerine bir dizi görevi yerine getirebildiklerini bildirdi. robotların fiziksel özelliklerinden yararlanma, takımın ” görev düzenlemesi ” olarak adlandırdığı bir özellik .
Randall, ekibin BOBbot’ları veya adlarını ayrıntılı fiziğin öncüsü Bob Behringer’dan alan “davranan, organize eden, uğultu yapan robotları”, “olabildiğince aptal” diye açıklıyor Randall. “Silindirik şasilerinin altında titreşimli fırçalar ve çevresinde gevşek mıknatıslar var, bu da onların daha fazla komşusu olan yerlerde daha fazla zaman geçirmelerine neden oluyor.” Deneysel platform, sistemin laboratuvarda çalışmak için uygun olmayan yönlerini incelemenin bir yolu olarak, Georgia Tech fizik öğrencisi Shengkai Li tarafından yönetilen hassas bilgisayar simülasyonları ile desteklendi.
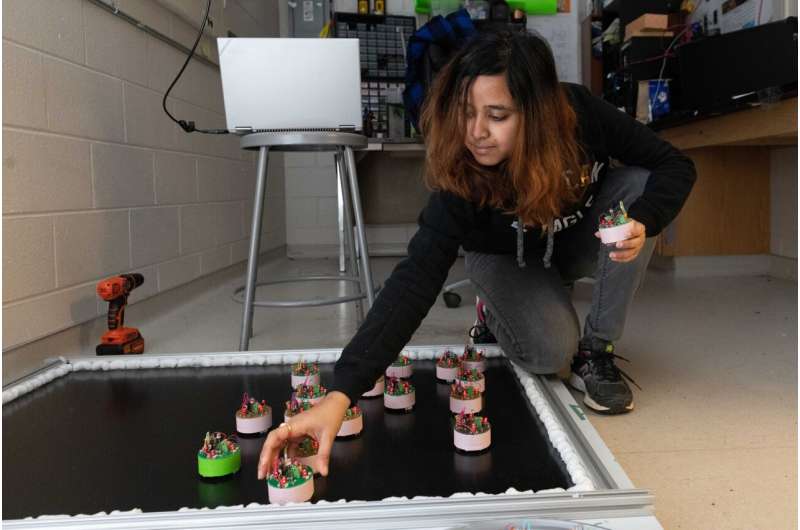
BOBbotların basitliğine rağmen, araştırmacılar, Goldman’a göre, robotlar hareket ettikçe ve çarpıştıkça, “tek başına hareket edemeyecek kadar ağır olan kalıntıları toplu olarak temizleyebilen kompakt kümeler oluştuğunu” keşfettiler. “Çoğu insan koordinasyonu garantilemek için giderek daha karmaşık ve pahalı robotlar üretirken, biz çok basit robotlarla hangi karmaşık görevlerin gerçekleştirilebileceğini görmek istedik.”
Science Advances dergisinde 23 Nisan 2021’de bildirildiği üzere, çalışmaları, bir satranç tahtası üzerinde hareket eden parçacıkların teorik bir modelinden ilham aldı. BOBbot’ların matematiksel bir modelini titizlikle incelemek için kendi kendini organize eden parçacık sistemi olarak bilinen teorik bir soyutlama geliştirildi. Araştırmacılar, olasılık teorisi , istatistiksel fizik ve stokastik algoritmalardan elde edilen fikirleri kullanarak , teorik modelin manyetik etkileşimler arttıkça bir faz değişimine maruz kaldığını kanıtlayabildiler – gördüğümüz faz değişimlerine benzer şekilde, büyük, kompakt kümeler halinde aniden dağınıktan kümelenmeye değişiyor. su ve buz gibi ortak günlük sistemlerde.

“Titiz analiz bize sadece BOBbot’ları nasıl inşa edeceğimizi göstermekle kalmadı, aynı zamanda algoritmamızın bazı robotların hatalı veya öngörülemez olmasına izin veren doğal bir sağlamlığını ortaya çıkardı,” diyor, aynı zamanda bir bilgisayar bilimi profesörü ve yardımcı olarak da hizmet veren Randall Georgia Tech’de matematik profesörü.
Alıntıdır bknz: Techxplore