


Otonom araç nedir?
Otonom araçlar, yapay zeka ve derin öğrenme algoritmaları ile desteklenerek çevredeki algılama ile trafik durumuna göre sürücü olmadan kendi kendine gidebilen araçlara denilmektedir.

Otonom Sürüş Seviyeleri


- Seviye 0: Otomasyon teknolojisine sahip olamayan bu seviyede vites değişimi, direksiyon kontrolleri gibi sürüş dinamiği sürücü tarafından kontrol edilir.
- Seviye 1: Bu teknolojinin ilk adımı seviye 1 araçları tarafından oluşmaktadır. Seviye 1 de şerit takip sistemi, hız sabitleyici ve fren asistanı gibi temel sürücü yardımları içermektedir.
- Seviye 2: Direksiyon kontrolü, hız arttırma ve yavaşlatma gibi sürüş fonksiyonları sürücü müdahalesi olmayarak gerçekleştirilen araçları tanımlamaktadır. Fakat bu seviyede araçların çevresel koşul takibi hala sürücü tarafından yapılmaktadır.
- Seviye 3:Araçlar engel karşısında frenleme ile çevresel koşulları kontrol altına alabilmektedir. Fakat yol engellerinde ve tehlikeli hava koşullarında cevap veremedi durumlarda sürücü müdahalesini zorunlu kılmaktadır.
- Seviye 4: Otonom araç endüstrisinde ulaşılan en yüksek seviyeyi temsil etmektedir. Yüksek otomasyon olarak tanımlanır bu seviye de sürüşün bütün aşamaları otonom sistem tarafından kontrol edilmektedir. Fakat ekstrem senaryolarda vermesi gereken tepkilerde tamamen eğitilemediği için sürüş koşullarının tamamında yüzde yüz başarıya ulaşamamaktadır.
- Seviye 5: Bu seviye tam otomasyondur. Otonom araç teknolojisinde ki istenilen hedeftir. Araçta sürücü müdahalesi olmadan arazi fark etmeden, hava koşullarında ve engelli koşullarda uyum sağlaması hedeflenerek geliştirilmeye devam edilmektedir. Tam otonom sistemin aktif şekilde çalışması için makine öğretimi modelleri eğitimini en iyi şekilde tamamlaması gerekmektedir.
Araçlarda Kullanılan Kontrol Elemanları

Algılayıcılardan gelen bilgiler: Sensör bilgileri, yer belirleme ve harita bilgileri ile birleştirilen veri, planlama ve kontrol ünitesine aktarılmaktadır. Aracın yerine getirmesi gereken yol ve hareket planlaması, aracın hız değerleri, frenleme ve yönetim şekli gibi görevleri belirleyip uygulamaktadır. Anlık durum ile ilgili bilgiler gerektiğinde görüntüleme ve uyarlar geribildirim şeklinde ekrana aktarılmaktadır.
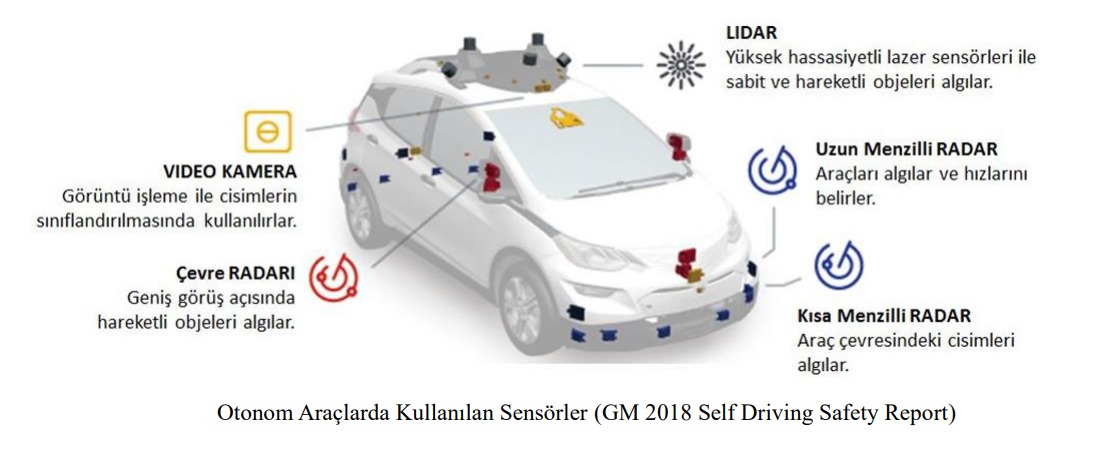
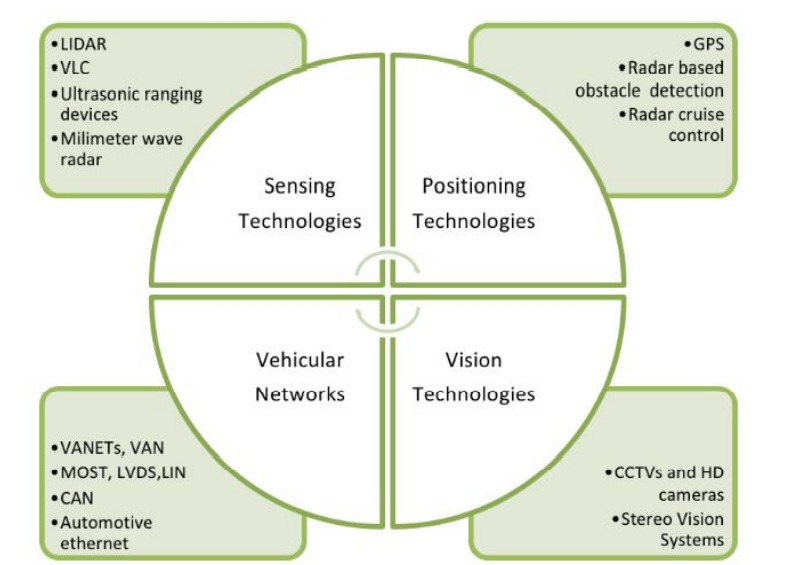
Akıllı araçlarda elektrik-elektronik donanımlar: Radar (Elektromanyetik dalga esaslı) algılayıcılar, Lidar (Lazer ışını esaslı) algılayıcılar, Ultrasonik (Ses dalgası esaslı) algılayıcılar, Normal/Kızılötesi(termal) kamera ve algılayıcılar, GPS, Bilgisayar ve yazılım, Araç Kontrolü.

1.Radar (Radio Detection and Ranging): Gönderilen radyo dalgaları ile yansıyan radyo dalgalarını alıcı ile ölçümleyerek nesnelerin uzaklığını, açısını kullanarak algılamaktadır. Nesnelerin hızını da Doppler Etkisi’ni kullanarak algılamaktadır. (Doppler Etkisi:Dalga özelliği gösteren fiziksel varlığın frekansı ve dalga boyunu hareketli gözlemci tarafından farklı zamanlar ve konumlar da farklı algılamasına denmektedir.)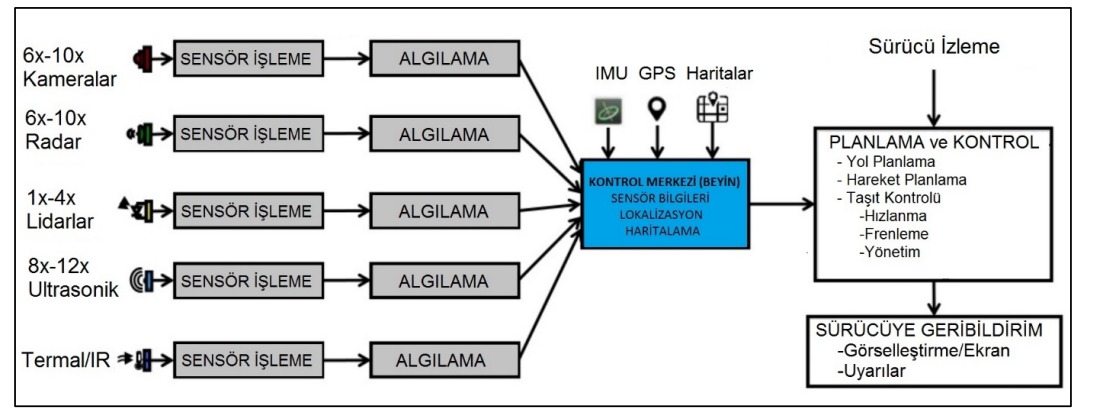

2.Lidar (“Light Detection and Ranging” ya da “Light Imaging, Detection and Ranging”) Sensörler: Radar ile aynı görevi görmektedir. Radyo dalgaları yerine;ışık kaynağını, özellikle de Kızılötesi Lazer sinyalleri gönderip algılamaktadır. Bu teknoloji coğrafi verileri toplayarak 3D haritalara yansıtılan çevresel modellemelerin üretilmesine yardımcı olmaktadır. 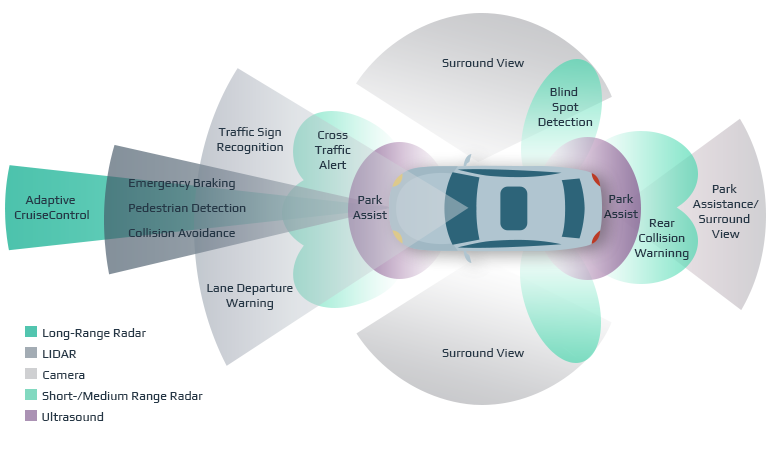

3.Ultrasonik Sensörler: Ses dalgaları yardımı ile nesneleri algılayıp, mesafe ölçümünde kullanılmaktadır. Araçlarda kullanılan park sensörleri ultrason bazlıdır. Aracın yakın çevresindeki engeller konusunda uyarıcı niteliktedir.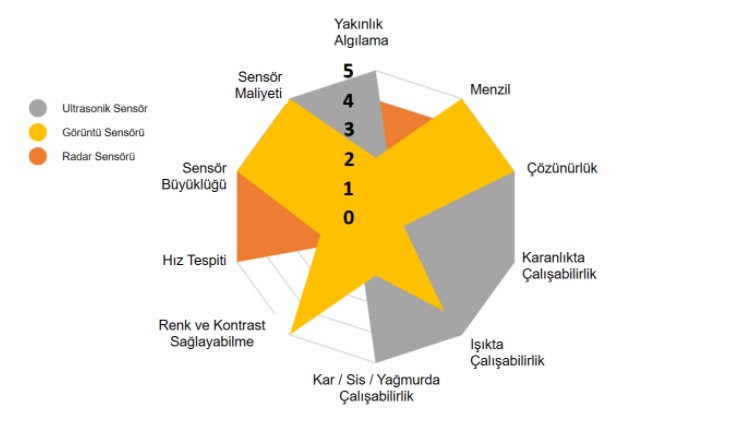

4.Kameralar: Aracın içinde ve dışındaki nesnelerin görüntüsünü araç içinde bulunan ana bilgisayara aktarmak için kullanılmaktadır. Kızılötesi (Infrared) kameralar, normal kameralardan farklı olarak,
nesnelerin sıcaklıklarının algılanmasında kullanılmaktadır. Kamera ve algılayıcıların sürekli temiz tutulmaları,
veri kalitesi yönünden önemli olmaktadır.

5.GPS: Bu sistem dünya etrafında dönen uydulardan sinyaller alarak kendi bulunduğu yerin küresel koordinatlarını belirlemekte kullanılmaktadır. Koordinatlarla yol haritası koordinatlarıyla eşleştirilerek aracın yol üzerindeki pozisyonu belirlenmektedir. GPS sistemi, içinde bulunan jiroskop ve ivmeölçer ile sürekli olarak aracın pozisyonunu, yer değiştirmesini ve hızını ölçen bir sistemle birlikte kullanılmaktadır.


6.Bilgisayar ve Yazılım: Sistem kontrolünde kullanılan bilgisayar ve yazılım sürücüsüz araçlarda en önemli unsurdur. GPS sinyalleri, veri aktarımları, trafik levhaları, diğer taşıtlarla etkileşim ve iletişim, kontrolü sağlayan bir bilgisayar ve koşan bir yazılımla gerçekleşmektedir. Yapay Zekâ destekli yazılımlar, sistemin giriş ünitelerinden gelen bilgileri değerlendirip, olması gereken duruma göre çıktı vererek, aracın hareketini belirlemektedir.


7.Araç Kontrolü: Araç yol,trafik durumuna göre istenilen hız seyri ve hız ayarlama sistemi (Cruise Control ve Adaptif Cruise Control) gerçekleştirilmektedir. Aracın yönlendirilmesi; araç direksiyon sistemine monte edilen step, servo veya hidrolik motor yardımı ile gerçekleşmektedir. Aracın hareketi ve durdurulmasına kullanıcı karar vermektedir. Acil durumlarda aracı kontrol eden bilgisayar tarafından otomatik devreye alınmaktadır.
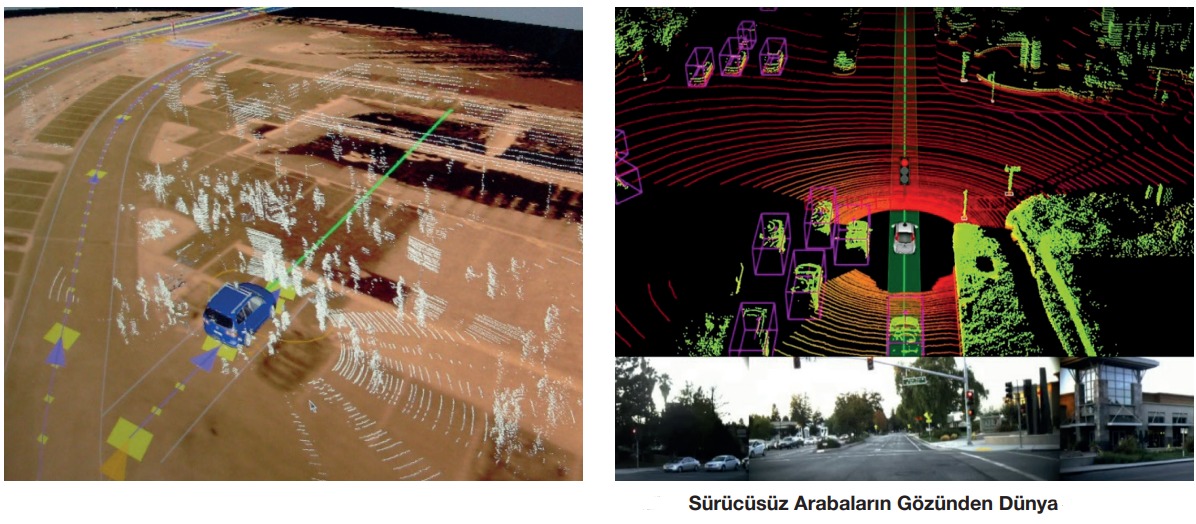


Kullandıkları algılayıcılar ve yapay zekânın yardımıyla günümüzde sürücüsüz araçların yapabildiklerinin bir kısmını aşağıdaki gibi sıralayabiliriz:
- Yol çizgilerini okuyabiliyorlar (kesik çizgi serbest, düz çizgi şerit değiştirme yasağı gibi).
- Çizgisi olmayan veya soluk çizgili yollarda gidebiliyorlar.
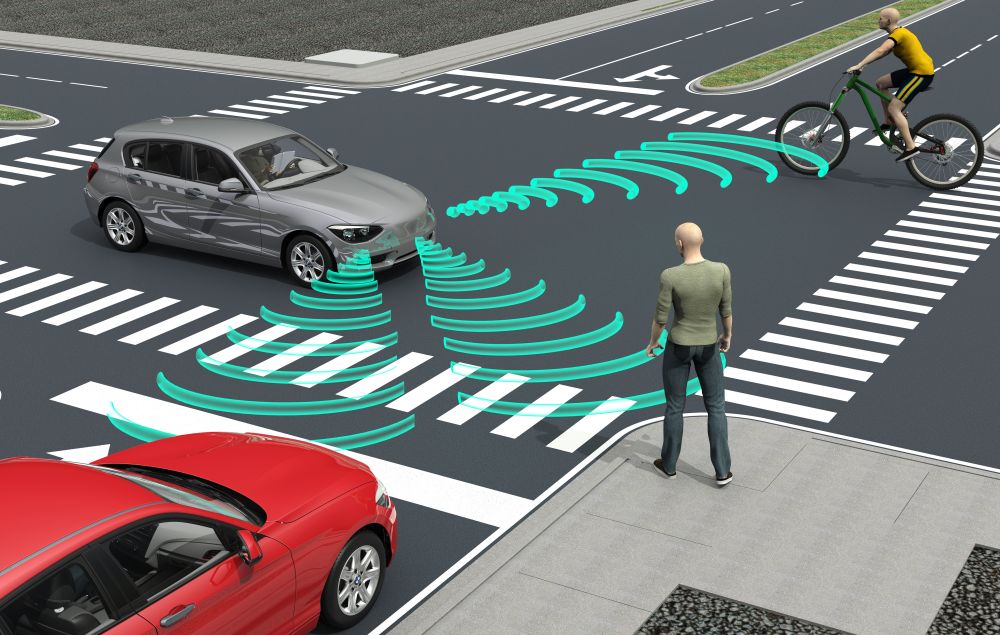
- Dönüş için sinyal vermiş bir aracı veya kolunu kaldırmış bir bisikletliyi fark edip yol verebiliyorlar. Farklı araç tiplerini ayırt edebiliyorlar. Örneğin okul servisi veya ambulans gibi yol önceliği olan araçları trafikte tespit edip yol verebiliyorlar.
- Hareket halindeki araçların hız ve rotalarına göre çarpışma ihtimalini hesaplayabiliyorlar. Örneğin yeşil ışıkta geçen sürücüsüz araç, yan yolda kırmızı ışıkta bekleyen bisikletlinin, kural ihlali yaparak kırmızı ışıkta geçme ihtimalini hesap ederek gerekirse rotasını bu ihtimal doğrultusunda belirleyebiliyor.
- Trafik polisinin dur, geç vb. el işaretlerini algılayıp verilen talimatlara uyabiliyorlar.