

Zürih Üniversitesi’ndeki robotik araştırmacıları, hasarlı quadcopters’ı havada tutmak ve GPS olmadan bile dengeli bir şekilde uçmak için yerleşik kameraların nasıl kullanılabileceğini gösteriyor.
Endişeli yolcular genellikle güvende olduğundan, ticari uçaklar, motorlardan biri çalışmayı durdursa bile kolayca uçmaya devam edebilir. Ancak dört pervaneli dronlar için – aynı zamanda quadcopters olarak da bilinir – bir motorun arızalanması daha büyük bir sorundur. Yalnızca üç rotor çalışırken, drone stabilitesini kaybeder ve acil durum kontrol stratejisi belirlenmedikçe kaçınılmaz olarak çöker.
Zürih Üniversitesi ve Delft Teknoloji Üniversitesi’ndeki araştırmacılar şimdi bu soruna bir çözüm buldular: Uçakta bulunan kameralardan gelen bilgilerin, bir rotor aniden çıktıktan sonra dronu stabilize etmek ve otonom olarak uçmasını sağlamak için kullanılabileceğini gösteriyorlar.
Balerin gibi dönüyor
UZH’deki Robotik ve Algılama Grubu’nun ve araştırmayı finanse eden NCCR Robotics’teki Rescue Robotics büyük yarışmasının başkanı Davide Scaramuzza, “Bir rotor arızalandığında, dron bir balerin gibi kendi üzerinde dönmeye başlar,” diye açıklıyor . “Bu yüksek hızlı dönme hareketi, dronun çok hassas konum ölçümlerine erişimi olmadığı sürece standart kontrol cihazlarının başarısız olmasına neden oluyor.” Başka bir deyişle, bir kez dönmeye başladığında, drone artık uzaydaki konumunu tahmin edemez ve sonunda çöker.
Bu sorunu çözmenin bir yolu, drone’ya GPS aracılığıyla bir referans konumu sağlamaktır. Ancak GPS sinyallerinin kullanılamadığı birçok yer vardır. Araştırmacılar, yaptıkları çalışmada, bu sorunu ilk kez GPS’e güvenmeden, farklı türdeki yerleşik kameralardan görsel bilgiler kullanarak çözdüler .
Etkinlik kameraları düşük ışıkta iyi çalışıyor
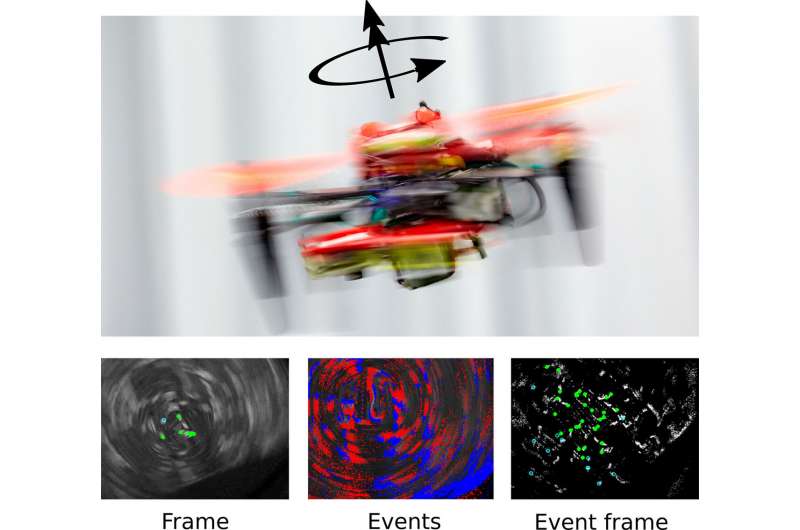
Araştırmacılar quadcopter’lerini iki tür kamera ile donattılar: sabit bir hızda saniyede birkaç kez görüntü kaydeden standart kameralar ve yalnızca ulaşan ışıkta bir değişiklik tespit ettiklerinde etkinleştirilen bağımsız piksellere dayanan olay kameraları. onları.
Araştırma ekibi, iki sensörden gelen bilgileri birleştiren ve onu dört rotorun çevresine göre konumunu izlemek için kullanan algoritmalar geliştirdi. Bu, yerleşik bilgisayarın drone’u uçarken ve dönerken yalnızca üç rotorla kontrol etmesini sağlar. Araştırmacılar, her iki tür kameranın da normal ışık koşullarında iyi performans gösterdiğini buldu. “Aydınlatma düştüğünde ise standart kameralar sonuçta disorients bu deneyim motion blur başlar Dron’u olay kameralar da çok düşük ışıkta iyi iş oysa ve onu çöküyor,” ilk yazar Sihao Güneş, Scaramuzza laboratuarında bir doktora sonrası söylüyor.
Kazaları önlemek için artırılmış güvenlik
Bu çalışmada ele alınan sorun, konuyla ilgili bir sorundur, çünkü dörtgenler yaygınlaşıyor ve rotor arızası kazalara neden olabilir. Araştırmacılar, bu çalışmanın GPS sinyalinin zayıf olduğu veya bulunmadığı tüm alanlarda quadrotor uçuş güvenliğini artırabileceğine inanıyor.
”Alıntıdır: Techxplore”