

Balık sürüleri, yiyecek bulmalarına, göç etmelerine ve avcılardan kaçmalarına yardımcı olan karmaşık, senkronize davranışlar sergiler. Hiç kimse balık veya balık takımı bu hareketleri koordine etmez ve balıklar daha sonra ne yapacakları konusunda birbirleriyle iletişim kurmaz. Daha ziyade, bu kolektif davranışlar sözde örtük koordinasyondan – balıkların komşularının yaptıklarını gördüklerine göre kararlar vermelerinden – ortaya çıkar.
Bu tür ademi merkeziyetçi, özerk kendi kendine organizasyon ve koordinasyon, özellikle robotik alanında bilim adamlarını uzun zamandır büyüledi.
Şimdi, Harvard John A. Paulson Mühendislik ve Uygulamalı Bilimler Okulu (SEAS) ve Wyss Biyolojik Esinlenilmiş Mühendislik Enstitüsü’ndeki bir araştırma ekibi, hareketlerini gerçek bir balık sürüsü gibi senkronize edebilen balıklardan ilham alan robotlar geliştirdi. Harici kontrol. Araştırmacılar , sualtı robotlarında örtük koordinasyonla karmaşık 3 boyutlu kolektif davranışları ilk kez gösterdiler .
Ph.D. Florian Berlinger, “Robotlar genellikle erişilemeyen veya insanlar için tehlikeli olan alanlarda, insan müdahalesinin bile mümkün olamayacağı alanlarda kullanılıyor” dedi. SEAS ve Wyss’de aday ve makalenin ilk yazarı. “Bu durumlarda, kendi kendine yeten, son derece otonom bir robot sürüsüne sahip olmak gerçekten faydalıdır. Örtülü kuralları ve 3 boyutlu görsel algıyı kullanarak , su altında yüksek derecede özerkliğe ve esnekliğe sahip bir sistem yaratmayı başardık. GPS ve WiFi gibi şeylerin erişilemediği yerlerde. “
Araştırma Science Robotics’te yayınlandı .
Blueswarm olarak adlandırılan balıktan ilham alan robotik sürü, SEAS’ta Fred Kavli Bilgisayar Bilimleri Profesörü ve Wyss Enstitüsü’nde Öğretim Üyesi olan Radhika Nagpal’ın laboratuvarında oluşturuldu. Nagpal’ın laboratuvarı, 1000 robot Kilobot sürüsünden termitten ilham alan robotik inşaat ekibine kadar kendi kendini organize eden sistemlerde öncüdür.
Ancak, önceki robot sürülerinin çoğu iki boyutlu uzayda çalışıyordu. Hava ve su gibi üç boyutlu alanlar, algılama ve hareket için önemli zorluklar oluşturur.
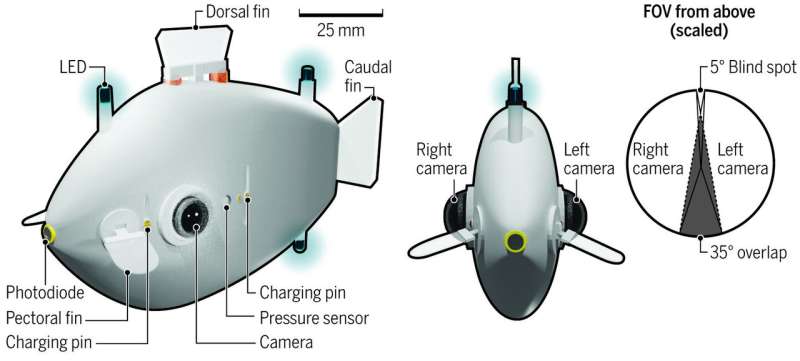
Bu zorlukların üstesinden gelmek için araştırmacılar, balık robotlarında mavi LED ışıklara dayalı vizyona dayalı bir koordinasyon sistemi geliştirdiler. Bluebot adı verilen her su altı robotu, iki kamera ve üç LED ışığı ile donatılmıştır. Yerleşik, balık lensli kameralar, komşu Bluebot’ların LED’lerini algılar ve mesafelerini, yönlerini ve yönlerini belirlemek için özel bir algoritma kullanır. Araştırmacılar , LED ışığın basit üretimi ve tespitine dayanarak , Blueswarm’ın toplanma, dağılım ve daire oluşumu dahil olmak üzere karmaşık kendi kendine organize davranışlar sergileyebileceğini gösterdi.

Berlinger, “Her Bluebot, komşularının tutumlarına dolaylı olarak tepki veriyor” dedi. “Yani, robotların bir araya gelmesini istiyorsak, o zaman her Bluebot, komşusunun her birinin konumunu hesaplayacak ve merkeze doğru hareket edecek. Robotların dağılmasını istiyorsak, Bluebotlar tam tersini yapıyor. Daire içinde bir okul, ışıkları doğrudan önlerinden saat yönünde takip edecek şekilde programlanmıştır. “
Araştırmacılar ayrıca, tankta kırmızı ışık bulunan basit bir arama görevini simüle ettiler. Dispersiyon algoritmasını kullanarak Bluebot’lar, biri onu algılamak için ışık kaynağına yeterince yaklaşana kadar tanka yayıldı. Robot ışığı algıladığında, LED’leri yanıp sönmeye başlar ve bu da okulun geri kalanında toplama algoritmasını tetikler. Oradan, tüm Bluebot’lar sinyal robotunun etrafında toplanıyor .
Nagpal, “Blueswarm ile elde ettiğimiz sonuçlar , su altında kendi kendine organize olan kolektif davranışların araştırılmasında önemli bir kilometre taşını temsil ediyor ” dedi. “Bu araştırmadan elde edilen bilgiler, mercan resifleri gibi görsel açıdan zengin ancak hassas ortamlarda çevresel izleme ve arama yapabilen gelecekteki minyatür sualtı sürüleri geliştirmemize yardımcı olacak. Bu araştırma aynı zamanda , davranışlarını sentetik olarak yeniden oluşturarak balık okullarını daha iyi anlamanın bir yolunu açıyor .”
”Alıntıdır.”